DTRG News
-
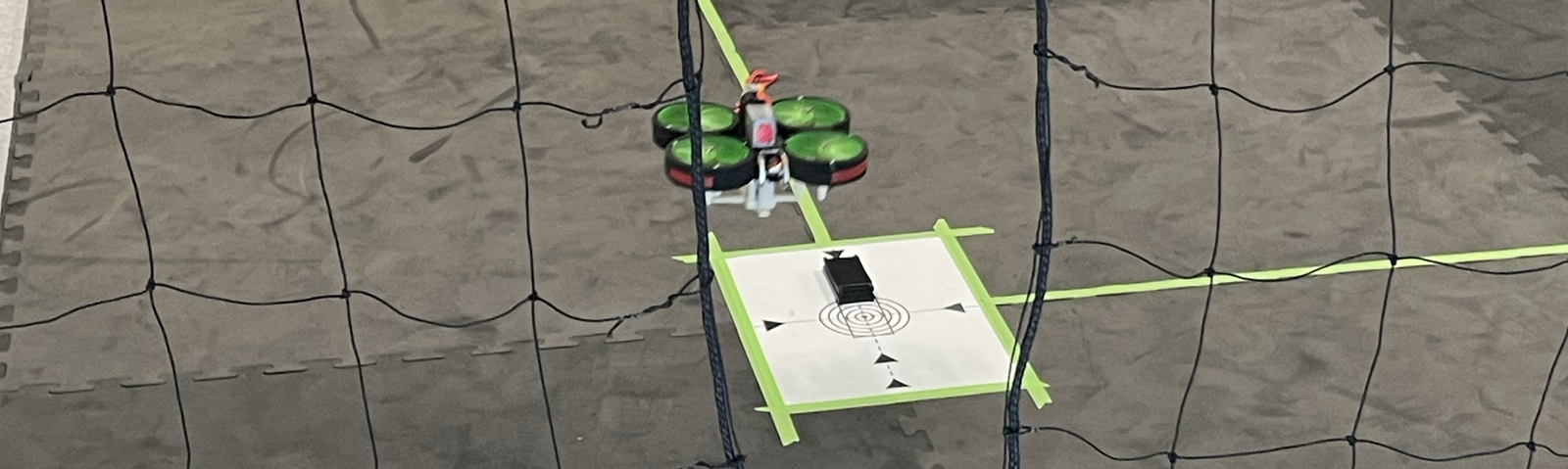
2025 Drone Indoor Competition Results
The competition was held Thursday 25th September, running from 12pm to around 4pm in 405-836E (MoCap Lab). Teams rotated through their 15 minute slots, having ten minutes prior to set up their unique designs to collect and deposit the payload. Some developed servo-powered claws, others used velcro, relying on the servo to flick the payload…
-

DTRG Demonstrates at Mānawa Mai – Open Day
Saturday 30th August was one of the busiest days in the University of Auckland Calendar, with the doors opened for Mānawa Mai – Open Day. As part of this event, DTRG not only had a table in the main display area, but also demonstrated our flight test capability in Motion Capture Lab Tours. Research Assistants…
-

Outdoors Flying with a Fixed-Wing UAV
Wind Tunnel Research moves outdoors with flight testing of a Fixed-Wing Flying Meteorological System. The latest in a recent series of projects in aerial meteorology, focused on gathering wind data in location not accessible by traditional sensors, this work aims to improve atmospheric models, and hence wind resilience, through increased data availability. Previously using multirotors,…
-

2025 Indoor Drone Competition is live!
The DTRG Indoor Drone Competition is back for 2025! The Drone Technology Research Group welcomes Part I, II and III Bachelor of Engineering (Honours) students from the University of Auckland to come along to our information session in 405-344 on Thursday 24 July at 1 pm. For official competition rules and updates, head on over…
-

Tree Trimming with a Drone
As part of the project to enable Unmanned Aerial Vehicles (Drones) to use Tools in Complex Dynamic Environments, the Drone Technology Research Group has successfully cut branches with the demonstrator aircraft. This aircraft is the result of the optimisation process developed by PhD student Salim Al-zubaidi, and is validating his models as it progresses through…
-

DTRG in Charlotte, NC
The Drone Technology Research Group recently visited Charlotte, NC, USA, for the 2025 International Conference on Unmanned Aircraft Systems (ICUAS). The conference ran from 14 to 17 May, and was hosted by the University of North Carolina at Charlotte. Our three papers can now be found on our publications page:
-

DTRG in Bristol
Members of the Drone Technology Research Group recently visited Bristol, UK, for the 15th Annual International Micro Aerial Vehicles Conference and Competition, hosted by the University of Bristol and University of West England. Our four papers can now be found on our publications page: The indoors competition this year focused on conservation, navigating through obstacles…
-

2024 Indoor Drone Competition Results
The competition was held on Wednesday 11 September (Week 7), from 3:30 pm to 7 pm, in the Motion Capture Laboratory (Room 405-836E). Teams were briefed at 3:30 pm, the first flight being half an hour later at 4 pm. Each team was given a 15 minute competition slot to do as much flying as…
-
2024 Indoor Drone Competition is live!
The DTRG Indoor Drone Competition is back for 2024! The Drone Technology Research Group welcomes Part I, II and III Bachelor of Engineering (Honours) students from the University of Auckland to come along to our information session in 405-222 on Monday 22 July at 12pm. For official competition rules and updates, head on over to…
-
Summer Research Scholarships Complete
We were lucky to have two great summer interns this year, working on various drone components which we may look to use going forward. Junwoo Park looked into the development of a gripper leg for drones, enabling them to land on branches when needed rather than hovering to maintain position. Ivan Hsu investigated the capability…