Enabling Unmanned Aerial Vehicles (Drones) to use Tools in Complex Dynamic Environments
This project is led by the University of Canterbury, funded by the New Zealand Ministry of Business, Innovation and Employment
Karl Stol, Bruce MacDonald, Salim Al-zubaidi, Angus Lynch, Xing Yan, Connor Williams, Nicholas Kay
Unmanned aerial vehicles (UAVs/drones) are revolutionising surveying and inspection tasks which once required manned aircraft, and are becoming a standard tool for a wide range of applications. However, one glaring omission is the ability to accurately use tools to perform precision tasks in high and hard-to-reach locations.
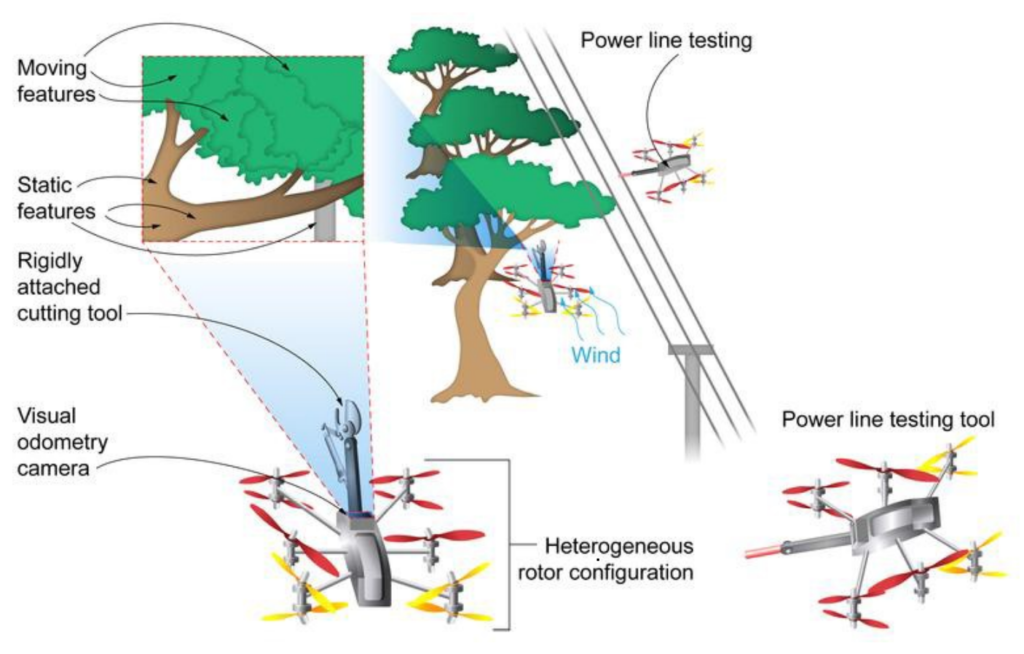
This research will design, build and demonstrate a compact UAV with precise six degrees-of-freedom positioning capability enabled by new control methods, airframe designs, aerodynamic models, and position estimation (visual odometry) in dynamically changing (windy) environments.
Dynamic Vertical Thrust Allocation Control for Heterogeneous Over-actuated Multirotor

Postdoctoral Research
Salim Al-zubaidi. Supervisor: Karl Stol
Homogeneous multirotor UAVs use constant vertical thrust allocation, as it allows all rotors to operate at the same speed, thereby achieving the same efficiency and responsiveness. However, with Heterogeneous UAVs that use different rotor sets such as Planetary Hex, this provides an opportunity to exploit the overactuated nature of the UAV to explore adjusting the hover-thrust distribution based on: Station-keeping criticality and Estimated external wrench.
Related:
Flight control of Unmanned Aerial Vehicles (UAVs, drones) for Physical Interaction with the Environment
Doctoral Research
Xing Yan. Supervisor: Karl Stol
Unmanned aerial vehicles (UAVs), due to their high maneuverability, are increasingly expected to perform operations that require precision. This places higher demands on the robustness of UAV controllers and the accuracy of control. This project aims to design a high-order controller to achieve compliant interaction between a tool-equipped UAV and the environment during physical contact, thereby ensuring both the stability of the UAV and the precise manipulation of the tool. To address the uncertainties inherent in unstructured environments, the new controller must possess adaptive and self-learning capabilities.
Related:
Dynamic control allocation for over-actuated multirotors
Doctoral Research
Connor Williams. Supervisor: Karl Stol
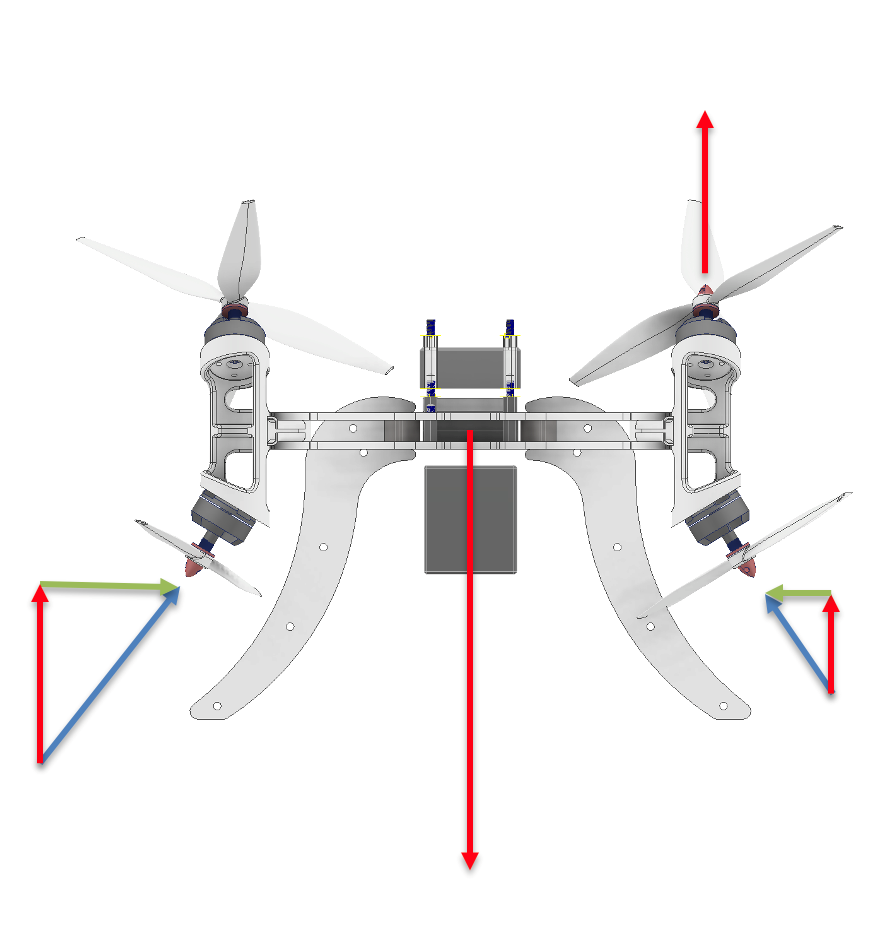
Over-actuated systems are under-constrained, meaning there is no unique solution for distributing thrust among the motors. This redundancy allows for the implementation of dynamic control allocation, where the distribution of force is adjusted in real-time to satisfy secondary objectives. This research investigates how these additional degrees of freedom can be leveraged to improve control authority while achieving additional goals such as thrust vectoring, wind rejection, or fault tolerance. By shifting from static mixing to dynamic allocation, this work aims to provide a robust framework for over-actuated UAVs to perform complex physical manipulation tasks in changing environments and conditions.
Related:
Direct Force Control for Physical Interaction of UAVs
ME Research
Caleb Mackle. Supervisor: Karl Stol
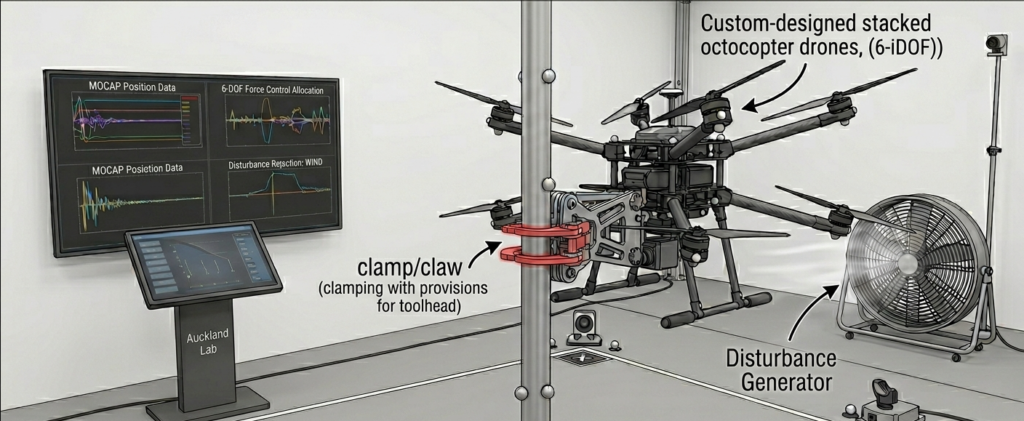
This research investigates direct force control for sustained aerial physical interaction using an over-actuated multirotor UAV. The approach emphasises the use of a wrist-mounted six-axis load cell as a primary feedback source, enabling direct measurement of interaction forces rather than relying on model-based estimation. A fully actuated planetary-hex platform is used to integrate this sensing into a closed-loop control framework for regulating contact during tasks of extended duration. A controller will be developed and compared against baseline methods. Simulation and experimental validation will assess stability and robustness under disturbances. The outcome is a validated control strategy that improves the capability of aerial robots to perform sustained contact tasks.
Related:
Fully-Actuated UAV Control for Canopy Sampling

BE(Hons) Research
Jimin Ahn & Tianling Lu. Supervisor: Karl Stol
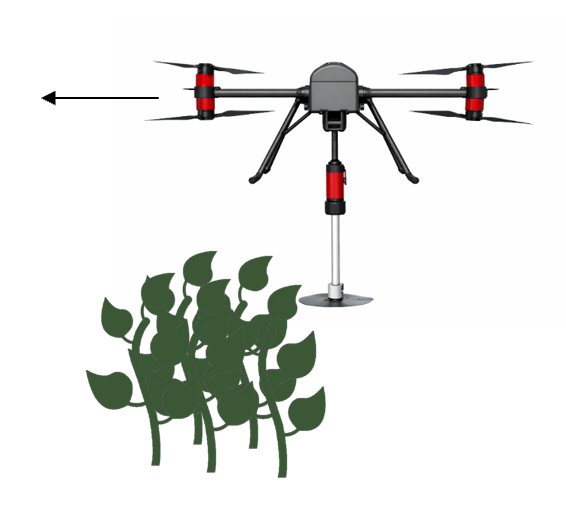
This Part 4 Project aims to design a system collecting physical samples of the branches at the top of a forest canopy. The research will involve a lightweight canopy sampling tool that is integrated on a fully-actuated UAV (2kg), a flight controller that is robust to forces from canopy sampling, a UAV platform that can carry necessary sensors and a companion computer for navigation. This is a cross-department project; software for autonomous navigation using onboard hardware will be developed by Ashwin Singh & Raiyan Khan in their Part 4 Project.
Related:
Aerial screwdriving for vertical poles
BE(Hons) Research
Raaghav Batra & Finlay Hayes. Supervisor: Karl Stol
Drones are increasingly used for inspection and maintenance tasks, but interacting precisely with structures remains a challenge. In 2024, a Part IV Project investigated screwdriving operation with a fully-actuated multirotor. The project focused on mechanism design for a screwdriving action with a flat, smooth surface. The 2026 project focuses on screwdriving fasteners to a vertical pole, requiring the development of a different mechanism and control system which enables an existing fully actuated drone platform to physically interact with and move around vertical poles. The project will involve design, analysis, and build and test.
Related:
Sensor Deployment Drone
BE(Hons) Research
Jack Bruce & Chris Dsilva. Supervisor: Karl Stol
Multirotor UAVs (drones) have the unique ability to access high locations quickly and hover there to perform tasks. A typical application is remote sensing, carrying only cameras, but the Drone Technology Research Group (DTRG) has been developing UAVs that can also physically interact with the environment. This project aims to develop a drone which can deploy and retrieve sensors or other devices onto flat vertical surfaces, and explore the challenges and capabilities of this practical application.
Related:
Autonomous Football Drone
BE(Hons) Research
Luke Morrow & Damon Rickman. Supervisor: Karl Stol
Drone football is a game created at DTRG socials, in which pilots manually control one or two small multirotor UAVs per team, scoring goals with a lightweight ball, on a 4 x 4m field. The project involves a mix of technology development (autonomous guidance with a motion capture system), research (downwash characteristics and downwash-ball interaction), and experimental work.
Autonomous Navigation for Canopy Sampling
BE(Hons) Research
Raiyan Khan & Ashwin Singh. Supervisor: Bruce MacDonald
Creating a navigation flight stack for a canopy sampling flying drone using aerostack2 in ROS2, simulate and testing it initially in gazebo in ROS2, then integrate with the drone created by mechanical engineering students and test it in real world conditions, on one or more aerial tasks.
Multi-Agent Reinforcement Learning based Navigation for Autonomous Drones
BE(Hons) Research
Louis Liu & Matthew McAuley. Supervisor: Henry Williams
This research project explores the application of multi-agent reinforcement learning (MARL) to enhance the autonomous navigation and interaction capabilities of drones in real-world environments. Reinforcement learning enables agents to learn decision-making policies through interaction with their environment, and its multi-agent extension allows multiple drones to learn cooperative, competitive, or decentralised behaviours that are difficult to achieve using conventional control approaches.
The project will focus on designing, implementing, and experimentally evaluating MARL methods for drone navigation and aerial interaction tasks. Both simulation and real-world platforms will be used, with an emphasis on understanding how learned behaviours transfer from simulation to physical systems. Particular attention will be given to sensor data integration, real-time processing constraints, inter-agent coordination, and robustness to environmental uncertainty.
A key motivation is addressing the simulation-to-reality gap inherent in learning-based control. While simulation is valuable for scalable training, it cannot fully capture complex dynamics, contact interactions, and environmental variability present in real flight. This project will therefore evaluate MARL policies across simulated and physical environments, analysing performance, generalisation, and failure modes.
Experimental work will be conducted in the Drone Lab, using a multi-drone platform equipped with onboard sensing and communication capabilities.
This work builds on ongoing work within the Robot Learning Team (robotlearningteam.org) – https://github.com/UoA-CARES/drone_gym
Towards Transient Wind Measurements from Fixed Wing Drones

This project was funded in 2025 by the Warwick and Judy Smith Engineering Endowment Fund
Nicholas Kay, Peter Richards (Hon. Associate Professor, University of Auckland), Amir Pirooz (National Institute of Water and Atmospheric Research), Dr Cesar Azorin-Molina (Spanish National Research Council)
In many terrains, it is impractical to establish traditional meteorological infrastructure, such as 10 m anemometer masts. Fixed-Wing UAVs have the range to reach these locations, and so may provide a solution. However, they are not the stationary reference point provided by ground-based measurements: their speed prevents measurement at a single point, and their motion distorts the data collected.
This research is investigating the challenges and distortion caused by the moving sensor array, and integrating this knowledge to develop an airborne meteorological system.
Flight Testing Fixed-Wing UAVs in a Wind Tunnel
BE(Hons) Research
Lachlan Dean & Stanley Tian. Supervisor: Nicholas Kay
Small fixed-wing unmanned aerial vehicles (FW-UAVs) are lightweight, low-cost, easy to deploy, and provide longer flight times than size-comparable quadcopters. However, their small size also makes them sensitive to turbulent wind conditions. Traditional wind tunnel testing methods hold the aircraft rigidly in place, preventing motion-induced damping of forces. Outdoors flight tests lack repeatability needed for controller development.
This project aims to develop a free-flight testing capability for FW-UAVs within the Boundary Layer Wind Tunnel at the Newmarket Campus. This will enable stable, zero-groundspeed flight, allowing the aircraft to ‘hover’ in place despite being a fixed-wing airframe.
Wind Sensing from a Fixed-Wing UAV
BE(Hons) Research
Thomas Enright & Qiuyang Zheng. Supervisor: Nicholas Kay
Atmospheric models draw data from a wide range of sources, but the most common for wind is the ground-based anemometer mast. These continuously record over period spanning years or even decades, but only represent a single point. In complex terrain, this results in the data being skewed by localised flows, and other features of interest being missed. A solution is to use an airborne anemometer. The problem, however, is that these are expensive, and often not designed for situations where crashes are reasonably likely.
This project is looking to develop a multihole probe for a fixed-wing UAV. This encompasses two core areas. The first is the aerodynamics of the probe, obtaining a calibration to translate the recorded pressures into a wind speed and direction. The second is doing so in such a way that it can be fitted onto a UAV.