Enabling Unmanned Aerial Vehicles (Drones) to use Tools in Complex Dynamic Environments
This project is led by the University of Canterbury, funded by the New Zealand Ministry of Business, Innovation and Employment
Karl Stol, Bruce MacDonald, Salim Al-zubaidi, Nicholas Kay, Angus Lynch
Unmanned aerial vehicles (UAVs/drones) are revolutionising surveying and inspection tasks which once required manned aircraft, and are becoming a standard tool for a wide range of applications. However, one glaring omission is the ability to accurately use tools to perform precision tasks in high and hard-to-reach locations.
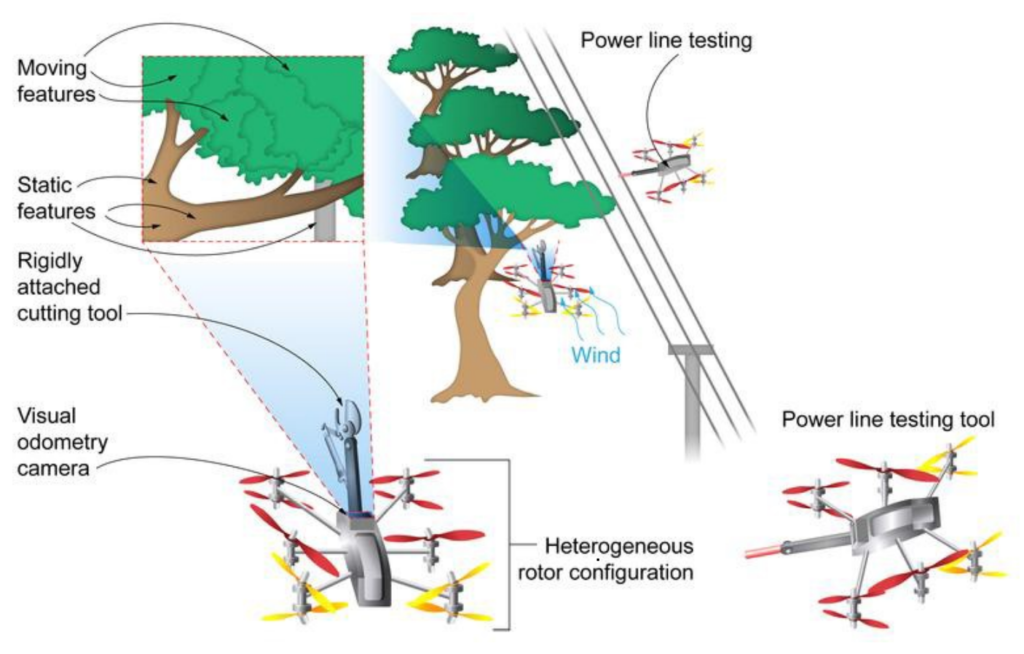
This research will design, build and demonstrate a compact UAV with precise six degrees-of-freedom positioning capability enabled by new control methods, airframe designs, aerodynamic models, and position estimation (visual odometry) in dynamically changing (windy) environments.
Dynamic Vertical Thrust Allocation Control for Heterogeneous Over-actuated Multirotor

Postdoctoral Research
Salim Al-zubaidi. Supervisor: Karl Stol
Homogeneous multirotor UAVs use constant vertical thrust allocation, as it allows all rotors to operate at the same speed, thereby achieving the same efficiency and responsiveness. However, with Heterogeneous UAVs that use different rotor sets such as Planetary Hex, this provides an opportunity to exploit the overactuated nature of the UAV to explore adjusting the hover-thrust distribution based on: Station-keeping criticality and Estimated external wrench.
Related:
Flight control of Unmanned Aerial Vehicles (UAVs, drones) for Physical Interaction with the Environment
Doctoral Research
Xing Yan. Supervisor: Karl Stol
Unmanned aerial vehicles (UAVs), due to their high maneuverability, are increasingly expected to perform operations that require precision. This places higher demands on the robustness of UAV controllers and the accuracy of control. This project aims to design a high-order controller to achieve compliant interaction between a tool-equipped UAV and the environment during physical contact, thereby ensuring both the stability of the UAV and the precise manipulation of the tool. To address the uncertainties inherent in unstructured environments, the new controller must possess adaptive and self-learning capabilities.
Related:
Control Allocation Optimisation for Over-Actuated Multirotor UAVs
Masters Research
Jaap Skinner. Supervisor: Karl Stol
This project focuses on advancing UAV control for fully and over-actuated airframes, which enable precise, independent control of position and orientation across all six degrees of freedom. By tackling challenges in control allocation and accurate estimation of physical parameters, the research aims to improve flight stability, efficiency, and robustness—especially in dynamic and complex environments.
The work explores optimization and adaptive control strategies alongside refined physical parameter estimation, contributing to safer, more versatile UAVs for industrial applications like monitoring, delivery, and autonomous exploration.
Related:
Towards Transient Wind Measurements from Fixed Wing Drones

This project was funded in 2025 by the Warwick and Judy Smith Engineering Endowment Fund
Nicholas Kay, Peter Richards (Hon. Associate Professor, University of Auckland), Amir Pirooz (National Institute of Water and Atmospheric Research), Dr Cesar Azorin-Molina (Spanish National Research Council)
In many terrains, it is impractical to establish traditional meteorological infrastructure, such as 10 m anemometer masts. Fixed-Wing UAVs have the range to reach these locations, and so may provide a solution. However, they are not the stationary reference point provided by ground-based measurements: their speed prevents measurement at a single point, and their motion distorts the data collected.
This research is investigating the challenges and distortion caused by the moving sensor array, and integrating this knowledge to develop an airborne meteorological system.