Enhancing the Efficiency of a Novel Drone
Summer Research Project, 2025 – 2026
Sean Jekel. Supervisor: Nicholas Kay
Coaxial rotors, where two or more rotors are mounted on the same axis, provide more thrust than a single rotor, without significantly increasing the size of the aircraft. However, the lower rotor of the pair suffers from reduced efficiency due to the wake from the upper rotor.
This project looks at whether the efficiency of the rotor pair can be improved by changing the blade pitch of the lower rotor relative to the upper rotor.
Related:

Exploring UAV Configurations: Agility-Driven Optimisation of UAV Airframes
PhD Research, 2022 – 2025
Salim Al-zubaidi. Supervisors: Karl Stol & Peter Xu
The increasing complexity of Unmanned Aerial Vehicle (UAV) tasks has driven the development of several different fully-actuated configurations to improve their abilities. This research aims to develop methods for evaluating, optimising, and comparing fully-actuated UAV configurations, focusing on agility as a key performance metric and exploring how heterogeneous configurations can be utilised in flight.
The research explores UAV characteristics from a modelling perspective, developing generalisable models for propulsion systems and UAV dynamics with high fit metrics. A generalised optimisation framework is proposed to optimise various fixed-tilt configurations, allowing comparison between them. The method can handle both continuous variables, such as geometry, and discrete variables, such as off-the-shelf components. The optimisation is utilised to conduct a parametric analysis to identify how different design modifications influence UAV characteristics across different design requirements.
Related:
- Enabling Unmanned Aerial Vehicles (Drones) to use Tools in Complex Dynamic Environments
- Experimental Validation of a UAV Configuration Optimisation Algorithm
- Drone Airframe Optimization
- Variable-Pitch Propellers for Highly Agile Drones
Read:
- Al-Zubaidi, S., Stol, K. “Analysis of the Transient Response of UAV Rotors”, 14th Annual International Micro Air Vehicle Conference and Competition, Aachen, Germany, 2023
- Al-Zubaidi, S., Stol, K. “Preliminary design optimisation of a novel fixed-tilt heterogeneous UAV for horizontal agility”, 2022 International Conference on Unmanned Aircraft Systems (ICUAS), 2022
- Al-zubaidi, S., Stol, K. “Design Optimisation of Fully Actuated UAVs Using Hybrid Optimisation”, Journal of Intelligent & Robotic Systems, vol. 111, no. 1, pp. 1–21, 2025.

Control Allocation Optimisation for Over-Actuated Multirotor UAVs
ME Research Project, 2025
Jaap Skinner. Supervisor: Karl Stol
This project focuses on advancing UAV control for fully and over-actuated airframes, which enable precise, independent control of position and orientation across all six degrees of freedom. By tackling challenges in control allocation and accurate estimation of physical parameters, the research aims to improve flight stability, efficiency, and robustness—especially in dynamic and complex environments.
The work explores optimization and adaptive control strategies alongside refined physical parameter estimation, contributing to safer, more versatile UAVs for industrial applications like monitoring, delivery, and autonomous exploration.
Related:
Modified Quadcopter Control for Physical Interaction
MAeroE Research, 2025
Cameron Dallas. Supervisor: Karl Stol
UAVs are seeing increasing use for tasks that require reaching elevated or hazardous locations, making them particularly useful for infrastructure inspections of towers and bridges. These inspections are currently performed using cameras and sensors for non-contact assessment. However, contact-based testing could yield more detailed and comprehensive data about structural conditions.
This project explores UAV physical interaction with stationary surfaces. It investigates the ability of a quadcopter equipped with an additional rotor providing horizontal thrust, to maintain surface contact while manoeuvring. the UAVs effectiveness will be demonstrating by its ability to draw on a whiteboard.

Impact of surrounding structures on coaxial rotor thrust
BE(Hons) Research Project, 2025
David de Vaal & Cooper Hart. Supervisor: Nicholas Kay
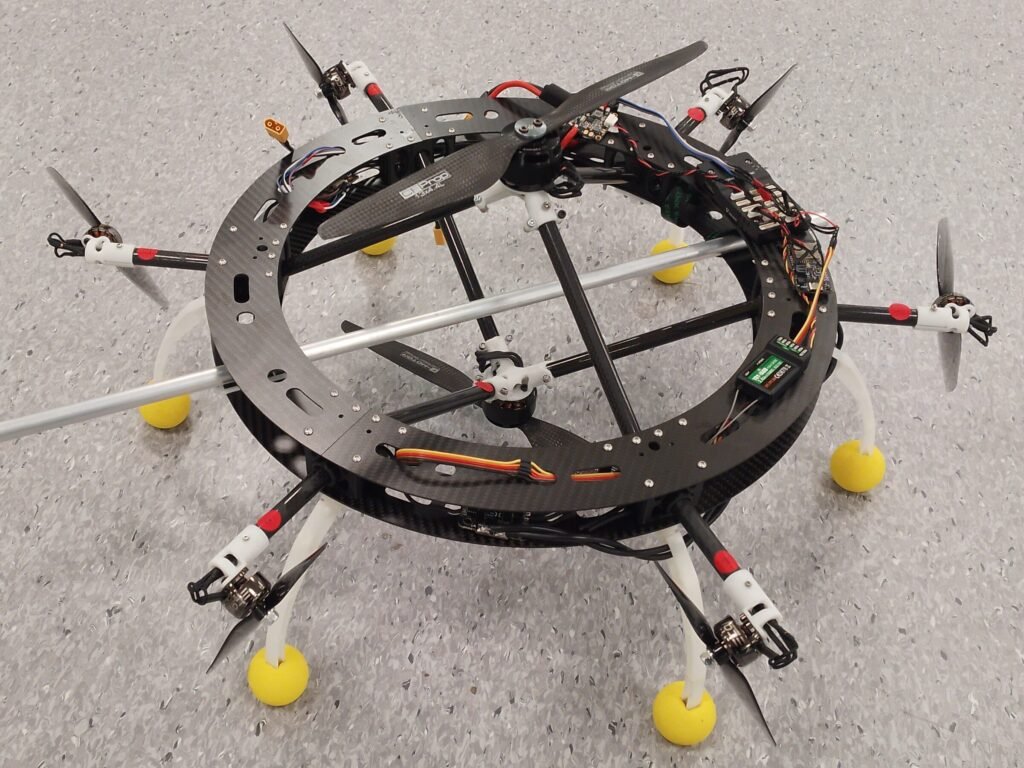
Coaxial rotors are known to suffer from mutual interaction of their inflows and wakes, reducing performance relative to an isolated rotor. However, on the novel heterogeneous aircraft used in the group, there is the additional concern of the interaction of these rotors with the surrounding ring structure. Furthermore, this aircraft is intended to fly outdoors.
This project looks into the aerodynamic impact of the ring structure on the thrust produced by the coaxial rotors, both with and without wind..
Related:
Aerial Weed-Cutter: Mechanism Design and Low-Level Control
BE(Hons) Research Project, 2025
Ben Murray & Ryan Townsend. Supervisors: Karl Stol & Nicholas Kay
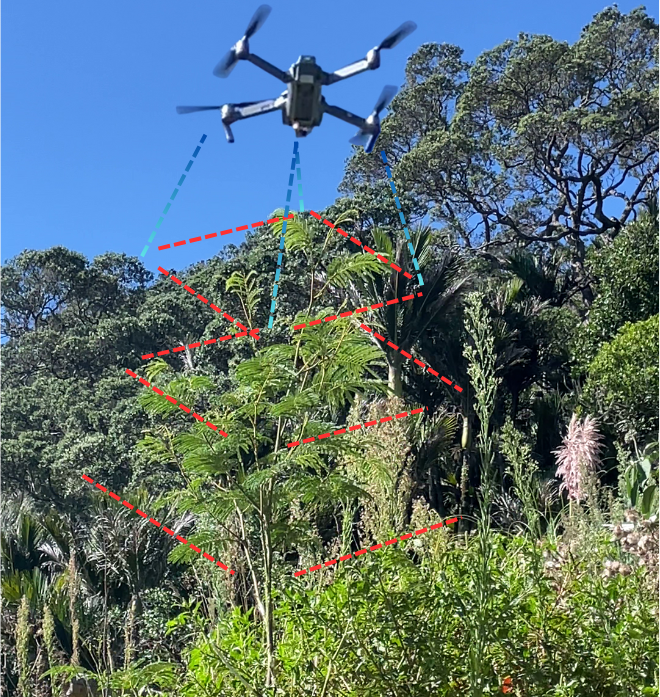
Our project forms one of two projects working toward an overall goal to develop an autonomous drone capable of cutting invasive weeds at inaccessible Murawai cliff slip sites to prevent them from forming a canopy and suffocating native plants.
Our project focuses on designing a mechanism to strip leaves from two weed species identified as being problematic: woolly nightshade (tobacco weed) and wattle. This mechanism needs to be lightweight and able to be mounted onboard the existing stacked octocopter drone developed by Pedro Souza in his PhD project. We will then tune the drone’s controller parameters to attenuate perturbations from mechanism operation and physical interaction with the environment, finally validating and quantifying the performance of the drone and mechanism in both controlled indoor and uncontrolled outdoor environments through experiments.
Related:

Machine Learning for Perception and Autonomy for Aerial Weed Cutting
BE(Hons) Research Project, 2025
Ivan Hsu & Matthew Potter. Supervisors: Karl Stol & Luke Hallum
In the aftermath of Cyclone Gabrielle, invasive weeds have significantly impacted the regrowth of native plants. Landslide sites, such as those in the Muriwai area, are not safely accessible to humans aiming to control weed growth. Therefore, UAVs are an excellent method for reducing hazards, time and labour in this area.
This project aims to integrate machine learning and computer vision with a fully-actuated drone platform for real-time weed classification and tracking. A high-level controller will also be implemented for autonomous navigation and decision-making in the invasive weed removal process.
Related:
Low-Cost UAV-based Wind Sensing
BE(Hons) Research Project, 2025
Matt Crosby & Logan Teirney. Supervisor: Nicholas Kay
Recording high-fidelity atmospheric data is crucial for the weather prediction models used to create forecasts and make future climate projections. In many remote locations, it may not be feasible or cost-effective to install permanent fixtures for data collection. In such cases, Uninhabited Aerial Vehicles (UAVs) can serve as a practical alternative.
Our project aims to develop an accurate, low-cost atmospheric sensor system for deployment in and around the Southern Alps, enabling the collection of high-quality data to support and enhance weather prediction models.
Related:
Dexterity assessment of over-actuated drones
ME Research, 2024
Chantelle Singh. Supervisor: Shahab Kazemi
Aerial manipulation is the ability to interact with the environment using a UAV. This is typically achieved using a tool or an aerial manipulator. An important characteristic in whether manipulation is successful is dexterity. There is yet to be a standardized way to assess the dexterity of UAVs.
This project will focus on developing a standardized dexterity assessment consisting of several tests to determine how dexterous an over-actuated UAV is. It will be such that it is easily replicated and can be used on a range of UAVs.
Related:
Read:

Fully-Actuated Pen-Drone
BE(Hons) Research Project, 2024
Elise Oxenham & Henry Guo. Supervisor: Karl Stol
One challenge with UAVs is the ability to precisely maintain a steady contact with a surface while it is in flight. Having this capability would prove to be immensely useful in numerous applications, such as infrastructure inspection of towers or bridges, which are not easily accessible by humans.
This project aims to experiment with UAV interaction with a stationary surface, through design and use of an aerial manipulator and control of the drone system. The desired result of this research is to demonstrate the functionality of this system by having the UAV draw on a whiteboard.
Incorporation of a Force sensor in Fully Actuated UAV and Control Design
BE(Hons) Research Project, 2024
Agustin Soto & Oliver Vannoort. Supervisor: Shahab Kazemi
Measuring forces is essential for a multi-rotor UAV to interact with the environment. Various methods exist for force measurement, including using springs to gauge deflection, employing an Inertial Measurement Unit (IMU) for force estimation, or direct use of a force sensor. Force measurement is particularly crucial for applications requiring controlled force exertion.
This project focuses on integrating a force sensor into a rigid attachment a fully-actuated UAV. The aim is provide online force feedback to be incorporated into the flight controller in order to achieve consistent flight and stable contact with the environment.
Related:

Variable Arm Angle and Control Modification for Multirotor UAVs
BE(Hons) Research Project, 2024
James Blackhurst & Oliver Reedy. Supervisor: Shahab Kazemi
Recent innovations in drone research has involved adding fixed arms for physical interaction. The introduction of rotating arms may play a pivotal role in potential physical interaction applications.
This project aims to develop and build a rotating arm attached to a fully actuated UAV. The drones controller and its gain will be modified to maintain stability and accuracy when the arm rotated around the drones axis. The drone control will also be designed to maintain performance when in physical contact with an object. The real-time angle of the arm will affect the control gains to maintain stability during free flight and contact.
Related:

Fully-Actuated Screwdriving Unmanned Aerial Vehicle
BE(Hons) Research Project, 2024
Louis Lee & Dulina Senevirathna. Supervisor: Karl Stol
Advancements in Aerial Manipulation research are continuously expanding the potential of drones to assist humans in the remote execution of dangerous tasks, thereby minimising risk to human life. Researchers have directed particular focus towards aerial manipulation tasks such as grasping, fetching, writing, peg-in-hole insertion, and vertical drilling into the ground. However, manipulation tasks involving horizontal screwdriving onto vertical surfaces remain relatively unexplored, yet are critical and prevalent in the engineering and construction sectors. We will be investigating the feasibility and implementation of such an operation on a fully-actuated UAV. We will also be developing a novel screwdriving actuator attachment for such a UAV to overcome challenges and achieve requirements associated with performing a screwdriving operation in the air, and perform tests to analyse and quantify its performance.
This research delves into the design of a novel lightweight screwdriving actuator for performing remote horizontal screwdriving operations using a fully-actuated UAV.
Read:

Cooperative Aerial Manipulation
BE(Hons) Research Project, 2024
Jaap Skinner & Connor Williams. Supervisor: Karl Stol
Payload control and precise positioning have become increasingly essential in various industries. Industries such as construction, agriculture, and many more often require the ability to position and orient payloads with unique geometries. Utilising a swarm of drones to perform these tasks presents a ground-breaking solution by allowing the payload-carrying capacity to be scaled using multiple drones while achieving high precision and control.
Traditional methods, such as cranes or helicopters, are often impractical due to their cost, lack of precision, excessive resource use (e.g., crane setup and pack down, helicopter flight from and to landing pad) and limited suitability for carrying payloads with unique geometries. The versatility and flexibility of a multi-drone system could provide a cost-effective and efficient alternative. This project explores the potential use of multi-drone systems to position and accurately orient objects with various geometries.

Performance of Variable Pitch Propellers in Wind
BE(Hons) Research Project, 2024
Ruby Chen & Alex Zhao. Supervisor: Nicholas Kay
Multirotor drones usually employ fixed-pitch propellers as their main means of flying. Simple, lightweight and reliable, these propellers suffer aerodynamically when used outside of their expected operational point. Furthermore, the system response is limited by the inertia of the motor-propeller combination, as force changes can only be made through changing the motor speed.
Variable Pitch offers a solution to this problem, being able to adapt to the incident wind and desired loading, while providing a faster change in force output. Used on helicopters and conventional aircraft, the aerodynamic loads of variable-pitch propellers and their transient response has not yet been studied for drone-sized aircraft.
This project will experimentally assess the steady and transient forces produced by a variable-pitch propeller in the presence of wind. This work will be conducted in the Boundary Layer Wind Tunnel, building on from prior research in the Drone Technology Research Group.
Related:
Read:

Transient Loads on a UAV in Turbulent Cross Flows
BE(Hons) Research Project, 2024
Hugh Holroyd & Doug Russ. Supervisor: Nicholas Kay
If you have flown into Wellington, you know about crossflows and windshear: that sudden gust catching the side of the aircraft, causing a discomforting jump for passengers. Now imagine that the aircraft is much, much smaller, and the gusts more frequent. This is the scenario facing small Uninhabited Aerial Vehicles (UAVs), which often operate low to the ground and are envisaged as a future means of urban delivery or traffic monitoring. It is critical that we understand the operational limits of these aircraft, to ensure safe and successful operations. Traditional wind tunnel tests are taken with the aircraft facing into the flow, with steady wind conditions. However, this is not representative of the environment experienced by small UAVs.
One such UAV is Kahu, a fixed-wing aircraft with a wingspan of 2.3 m. Using the Boundary Layer Wind Tunnel, you will conduct tests to record the forces and moments acting on the aircraft with various crosswinds, replicating the conditions expected in urban flight. This will be used to determine the sensitivity of the aircraft to crosswinds, and define operational limitations for safe flight in urban conditions.

An adaptable leg for multirotor UAVs
Summer Research Project, 2023 – 2024
Junwoo Park. Supervisor: Shahab Kazemi
Although UAVs have been developed to undertake a wide range of tasks which humans cannot accomplish, they face difficulties in being exposed to inaccessible and challenging environments. These disturbances, such as wind, can degrade the station-keeping performance of a UAV during missions, hindering its ability to complete the task.
This research is focused on designing effective and adjustable legs for UAVs, which provide vertical or multi-dimension support within various ranges of environment, allowing the UAV to perch like a bird when needed.

Agile and efficient? Novel lift rotors for a multirotor drone
Summer Research Project, 2023 – 2024
Ivan Hsu. Supervisor: Nicholas Kay
Multirotor drones that perform precise physical tasks outdoors must be both efficient and agile. Efficiency means extended flight durations for tasks, while agility allows the drone to effectively counter the impact of disturbances. However, with fixed pitch propellers, these requirements tend to conflict with each other as a larger rotor is more efficient, but less agile due to its large rotational inertia.
One solution is to use a variable pitch mechanism, which can adjust the angle of the blades and generate a rapid change in thrust. This project aims to analyse the efficiency and agility of a variable pitch rotor in conjunction with a standard fixed rotor in a co-axial configuration.
Related:

Drone Flight Control for Contact Testing of Powerlines
BE(Hons) Research Project, 2023
Jonty Kirk & Katrina Chan. Supervisor: Karl Stol
UAVs in autonomous power line inspection hold great potential for transmission and distribution companies. Our project conducts research on the stability control of an autonomous over-actuated UAV semi-perched on a simulated power transmission line. We will explore how different parameters such as approach angle and probe length affect the controller performance. This study will leverage the benefits of over-actuated drones that have more actuators than degrees of freedom.
This research will investigate how the flight controller can improve the efficiency and safety of power line inspections using drones.
Related:

Improving Control Allocation for Fully-Actuated UAVs
BE(Hons) Research Project, 2023
Jos Spaans & Sam Gilbert. Supervisor: Karl Stol
A UAV’s control allocator aims to distribute motor control effort to produce forces and moments that closely resemble those commanded by the controller. Commonly, the control allocator is derived by considering drone geometry, but this fails to account for aerodynamic effects like rotor interaction which introduce errors into the system.
This project aims to compensate for the complex aerodynamic interaction of an over-actuated octocopter by optimising the control allocator with a parameter estimation approach, using motion capture data to estimate generated forces and moments. The resulting allocation scheme should allow for improved reference-tracking performance during free flight.
Related:

Drone Airframe Optimization
BE(Hons) Research Project, 2023
Benjamin Holt & Cameron Dallas. Supervisor: Peter Xu
DTRG is developing over-actuated drones which can perform physical interaction tasks. Such drones require superior agility to accomplish these tasks.
This project will explore the application of genetic algorithms to optimize the drone airframe of over-actuated drones subject to agility. The team has defined the term “drone airframe” as inclusive of rotors (propeller and motor), battery, cant angle and dihedral angle of the rotors, total mass, and motor to motor diameter. The genetic algorithm is to be coded in python with the aid of existing evolutionary algorithm libraries: LEAP and DEAP.
Related:
Variable-Pitch Propellers for Highly Agile Drones
BE(Hons) Research Project, 2023
Lex Hostler & Raymond Hu. Supervisor: Nicholas Kay
The use of fixed-pitch propellers limits the agility and manoeuvrability of modern-day drones. Increasing both the diameter of the propeller and the motor size increases the maximum thrust capabilities but reduces the achievable bandwidth due to the increased rotational inertia.
This is where variable pitch mechanisms come into play. Instead of modulating purely motor speed, a combination of motor speed and blade pitch angle can be used to increase drone positioning and disturbance rejection control. This project aims to assess the transient performance of variable-pitch propellers that will later be used to design a novel overactuated drone.
Related:

Development of a Flying Meteorological Station
BE(Hons) Research Project, 2023
Hannah Brighouse and Kathy Hastie. Supervisor: Nicholas Kay
Coastal and mountainous regions of New Zealand currently lack the required atmospheric data to produce accurate weather prediction models. Multirotor UAVs are inexpensive and manoeuvrable, giving them the potential to provide sufficiently high-resolution data from these remote areas with difficult terrain. An external sensor mounted to a small UAV can measure wind speed and direction, but challenges arise due to the UAV’s motion relative to the ground and the effects of rotor downwash. This project aims to process raw sensor data taken in the boundary layer wind tunnel to produce accurate wind measurement results.
Related:

Free Flight of a Fixed-Wing UAV in a Wind Tunnel
BE(Hons) Research Project, 2023
Isabelle Burr, Jannik Wittgen. Supervisor: Nicholas Kay
The current methods used to test fixed-wing aircraft involves statically mounting a model airframe in a wind tunnel. This dampens the oscillatory responses of the model, resulting in potential inaccuracies in measurements. This project aims to allow for dynamic testing of airframes in the wind tunnel to avoid this issue. A fixed-wing UAV has been sourced and modified, with successful manual flights undertaken in the BLWT. The platform is now being developed further to allow for automated tests and to research the benefits of dynamic testing over static testing.

Case Studies on Octocopter Performance
Research Assistant Project, 2023
Caleb Probine. Supervisor: Karl Stol
The work in this project focuses on answering questions surrounding how different UAV parameters affect the final station keeping performance. Examined in the context of planar octocopters, this includes comparing various actuation methods, or determining the octocopter characteristics which most directly influence station keeping performance.
Related:
Read:

Experimental Validation of a UAV Configuration Optimisation Algorithm
Research Assistant Project, 2023
David Yang. Supervisor: Karl Stol
One of the main contributions to the MBIE project currently being developed is an optimisation algorithm for multicopter UAV configuration.
This project emphasizes on the validation of this algorithm, where an “instance” of the optimised UAV configuration is built according to specification. This instance’s properties and performance, such as mass, moment of inertia, maximum force, and agility, are evaluated against the optimisation prediction. A prototype UAV can then be developed with off-the-shelf components, tested for performance validation, and exploiting the PX4 architecture for full control of the UAV during testing.
Related:
Watch:

Autonomous Surveying of Plantation Forests using Multi-Rotor UAVs
PhD Research, 2018 – 2022
The use of multi-rotor UAVs as remote platforms as remote sensors has drastically increased in recent years, driven by ever-increasing performance and lower cost of ownership. One industry currently adopting multi-rotor UAVs is forestry with the concept of precision forestry, which maximizes wood yield by applying targeted remedies to underperforming groups of trees. Successful application of precision forestry requires detailed performance indicators of the forest, often through the manual measurement of trees on foot — a labour-intensive process ripe for automation.
This work presents a novel UAV system capable of automating the data collection aspects of this problem using onboard sensors to navigate typical plantation forest environments autonomously.
Watch:
Read:

H-Infinity Controller Testing for Wind Disturbance Rejection of a Homogeneous Octorotor UAV
ME Research, 2022 – 2023
Junyi Chen. Supervisor: Karl Stol
Stable station keeping performance of UAVs is an area of interest for many close-to-environment applications, particularly when interaction between the UAV and its environment is involved. Conventional underactuated quadrotor UAVs have been found to be incapable of the stability required for these applications due to their inherently coupled dynamics. As such, alternative physical designs and control techniques must be considered.
A position controller designed through H-infinity methods has been found to be robust to external disturbances and able to take advantage of the over-actuated capabilities of drones designed with a fixed rotor cant angle. The intent of this research is to validate the performance of a controller designed through H-Infinity methods on a canted-rotor octo-rotor UAV in various wind conditions.
Related:
- Enabling Unmanned Aerial Vehicles (Drones) to use Tools in Complex Dynamic Environments
- Aerodynamic Modelling and Wind Disturbance Rejection of Multirotor UAVs
Read:

Dynamics and Control of Aerial Vehicles for Prolonged Physical Interaction
PhD Research, 2018 – 2022
Pedro Mendes. Supervisors: Karl Stol & Jaspreet Dhupia
Aerial manipulation poses complex challenges for aircraft design, model, and control. This research investigates and presents solutions for compliant physical interactions when the coupled dynamics are distinctly different from free-flight conditions. Analytical, numerical, and experimental tools are used to develop aerial vehicles and controllers capable of accommodating these difficulties while maintaining performance and stability. Furthermore, a case study for tree branch manipulation demonstrates the practical feasibility and effectiveness of the designed platform and conceptual framework.
Related:
Watch:
Read:

Aerodynamic Modelling and Wind Disturbance Rejection of Multirotor UAVs
PhD Research, 2016 – 2022
Jérémie Bannwarth. Supervisor: Karl Stol
The use of multirotor unmanned aerial vehicles (UAVs) for applications close to the environment, such as physical sampling, inspection, and navigation in narrow environments, has increased drastically in recent years. Wind disturbances both increase the risks of collision and decrease the precision of the work performed by UAVs and are, therefore, a major limiting factor for these applications. This work improves UAVs’ wind disturbance rejection performance by investigating robust H-infinity control of a full-actuated, fixed-tilt octorotor. A new empirical aerodynamic model is developed to allow the model-based controller design and nonlinear simulations. Station-keeping performance is validated in a wind tunnel with motion capture in-the-loop.
Watch:
Read:
- Bannwarth, J. “Aerodynamic Modelling and Wind Disturbance Rejection of Multirotor Unmanned Aerial Vehicles”, PhD Thesis, The University of Auckland, 2022
- Bannwarth, J., Chen, Z., Stol, Karl., MacDonald, B., Richards, P. “Aerodynamic Force Modeling of Multirotor Unmanned Aerial Vehicles”, AIAA Journal 57(3), 2019
- Bannwarth, J., Chen, Z., Stol, K., MacDonald, B., Richards, P. “Development of a Wind Tunnel Experimental Setup for Testing Multirotor Unmanned Aerial Vehicles in Turbulent Conditions” 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 2018
- Chen, Z., Bannwarth, J., Stol, K., Richards, P. “Analysis of a Multirotor UAV with Tilted-Rotors for the Purposes of Disturbance Rejection”, 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 2018
- Bannwarth, J., Chen, Z., Stol, K., MacDonald, B. “Disturbance accomodation control for wind rejection of a quadcopter”, 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 2016

Wind Disturbance Rejection on an Over-Actuated Drone using Model Predictive Control
BE(Hons) Research Project, 2022
Caleb Probine & David Yang. Supervisors: Karl Stol & Nicholas Kay
Model Predictive Control makes predictions about the future trajectory of the drone and finds the optimal input to achieve that prediction. This controller differs from others because it can see the physical constraint of the motors (i.e. maximum power they can output) and take that into account when finding the optimal solution.
The objective of this project is to design such a controller for a planar octocopter, and compare it to previously developed control methods.
Related:
Watch:
Read:

Human Drone Physical Interaction
BE(Hons) Research Project, 2022
Iris Liu & Suvarna Swaraj. Supervisors: Karl Stol & Salim Al-zubaidi
Physical human drone interaction (PHDI) with underactuated drones has been widely explored due to its diverse applications from providing guidance to the visually impaired to virtual reality gaming. An opportunity exists in exploiting the decoupled translational and rotational dynamics of over-actuated drones for PHDI.
This research aims to improve knowledge about an over-actuated drone’s estimation of and response to contact forces during an interaction through tuning parameters of an admittance control architecture.
Watch:
Read:

Drone with Tilting-Rotor Configuration
BE(Hons) Research Project, 2022
Joshua Taylor & Matthew Edwards. Supervisors: Karl Stol & Salim Al-zubaidi
The ability to change direction quickly, referred to as agility, is crucial in a number of modern-day drone applications involving interaction and dynamic environments. While research exists on optimising the agility of the more commonly used fixed-tilt drone, improving agility by using variable-tilt drone designs remains unexplored.
This project involves building and testing a variable-tilt drone such that comparisons can be made to the performance of a fixed-tilt drone, in terms of its horizontal agility.
Related:
Read

Measuring the Wind from a Drone
BE(Hons) Research Project, 2022
Ivan Rakich & Lynn May. Supervisor: Nicholas Kay
Numerical weather prediction models suffer from a lack of reliable coverage in remote and inaccessible areas. Employing a UAV to gather weather data within these regions could prove to be a low cost solution. However, a UAV is not a fixed platform, and moves in response to the wind which it is trying to measure. Furthermore, downdraft from the rotors adds an extra wind component to the measurements which is not reflective of the environment.
Consequently, this project attempts to measure the local wind vector by mounting an external flow sensor to a UAV. Using the drone’s inertial measurement unit and motion capture feedback, this project aims to produce a data correction methodology to replicate the true flow behaviour.
Watch:

Canopy Sampling Aerial Manipulator
PhD Research, 2015 – 2019
James Kutia. Supervisors: Karl Stol & Peter Xu
The aim of a Canopy Sampling Aerial Manipulator drone is to physically sample canopy branches and replace conventional methods, such as tree climbing, which are labour-intensive, time consuming, and dangerous. Performance is validated in simulation and experiments using the motion capture environment. Here we can investigate influences such as station-keeping perturbations and deviations in sway motion.
Watch:
Read
- Kutia, J. “Aerial Manipulation for Canopy Sampling”, PhD Thesis, The University of Auckland, 2019
- Kutia, J., Stol, K.; Xu, W. “Aerial Manipulator Interactions With Trees for Canopy Sampling” IEEE/ASME Transactions on Mechatronics 23(4), 2018.
- Kutia, J., Xu, W., Stol, K. “Modeling and characterization of a canopy sampling aerial manipulator” 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 2016.
- Kutia, J. Stol, K., Xu, W. “Initial flight experiments of a canopy sampling aerial manipulator” 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 2016.
- Kutia, J., Stol, K., Xu, W. “Canopy sampling using an aerial manipulator: A preliminary study” 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 2015.

Skydiving Photography Drone and Autonomous Parachute Recovery System
BE(Hons) Research Project, 2018
Lawrence Pascual & Reuben Schuitemaker. Supervisor: Karl Stol
The aim of the multi-year Skydiving UAV is to provide a photography platform for skydiving operators.. A major aspect implemented is an autonomous parachute recovery system, to enable safe and reliable recovery.
Watch:

Farm Post Perching UAV
BE(Hons) Research Project, 2017
Tzu-Jui Lin & David Long. Supervisor: Karl Stol
Multirotor UAVs suffer from endurance issues due to limited battery capacity, greatly limiting their use for any task such as surveillance. To remedy this, a system was developed for perching of multirotor UAVs onto agricultural farm posts. The project consists of two major sections: design and testing of a perching mechanism and design and testing of a Computer Vision based system for automated landing, with the aim of the project to automate the perching.
Watch:

UAV with On-Board Object Path Following
BE(Hons) Research Project, 2015
Jay Mills & Blair Eastwood. Supervisor: Karl Stol
Autonomous object avoidance is critical to safe flight. Constructing a flight path from following an object is a means of attaining this without additional proximity sensing, as it is assumed that the object being followed has not collided with anything. However, rather than simply going to the object in the most direct way possible, path following means actually tracing out the route which the object took. This project developed an autonomous path tracking system for a UAV.
Watch:
